OLED Equipment
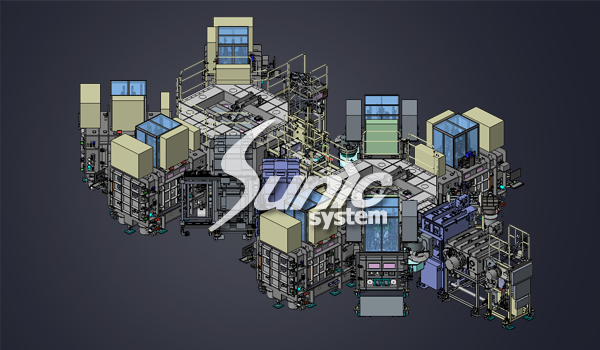
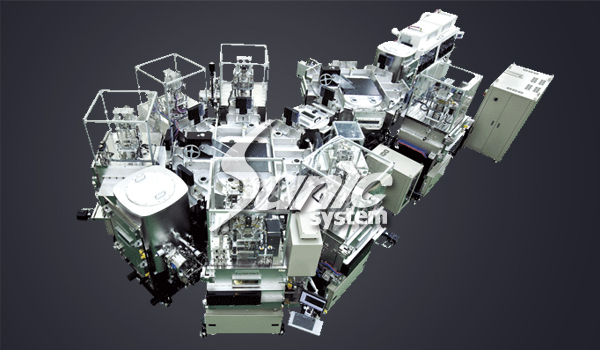
Cluster Type
중앙에 TM(Transfer Module, 이송챔버)을 기준으로 하여 각 PM(Process Module, 공정챔버 –
전자층, 전공층, 유기물층 등 기능성박막을 위한 챔버)을 배치하여 Vacuum robot 으로 물류를 구성하는 방식
- 핵심기술
- 증착 공정 순서에 따라 TM ↔ PM 간 기판(Substrate) 이송 물류 기술
- 정밀한 증착 패턴 형성 및 Auto Aligner 기술
- 기판 처짐 방지기술 및 Auto Feeding System 개발 (장시간 연속 증착 가능)
- Plasma Treatment 기술 개발
-

Cluster Type 대형 증착장비SUNICEL Plus 1850
- 6GH 925 * 1500 패널 장비
- 고해상도 모바일 제품
- 스마트폰 및 플렉시블 디스플레이
- 주 고객사 : AMOLED 패널 제조사
-
Cluster Type 중형 증착장비SUNICEL Plus 700
- 45GH 730 * 470 패널 장비
- AMOLED 패널 파일럿 양산 및 개발용
- 주 고객사 : AMOLED 패널 제조사
-
Cluster Type 중형 증착장비SUNICEL Plus 400
- 2GH 370 * 470 패널 장비
- AMOLED 패널 파일럿 양산 및 개발용
- PMOLED 패널 양산용
- 주 고객사 : AMOLED 및 PMOLED 패널 제조사
-

Cluster Type 소형 증착장비SUNICEL Plus 200
- 1GH 200 * 200 재료 평가 및 QC
- 물질개발 및 검증용
- 디바이스 제품개발 연구용
- 주 고객사 : AMOLED 패널 제조사, 국내외 OLED 물질
OLED Equipment
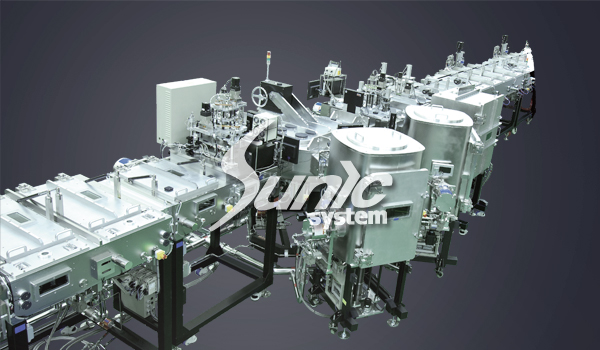
Inline Type

조명용 OLED 및 W-OLED 기반의 대형 OLED 패널 제조에 사용하는 고생산성, 고효율을 갖는 증착장비
고생산성을 위하여 Rail 구조를 통한 인라인 물류 방식을 적용하며, Linear Source 를 탑재 상향 증착방식
Cluster Type과 다르게 일렬로 진행되는 것이 특징
- 핵심기술
- 선형 증발원 증착 방식(유기물 증착용 linear Source)을 통해 다양한 유기소재 증착 가능
- 점 증발원 배열 방식(금속 증착용 Point Source)을 통해 무기물 증착 가능
-
Inline Type 중형 증착장비SUNICEL Plus 400L
- 2GH 370 * 470 패널 장비
- OLED 조명 개발 및 양산
- WOLED 디바이스 개발
- 주 고객사 : 국내외 조명 패널 제작사
-
Inline Type 소형 증착장비SUNICEL Plus 200L
- 1GH 200 * 200 패널 장비
- OLED 조명 개발
- WOLED 디바이스 개발
- 주 고객사 : 연구소 및 조명 패널 제작사